Robot Công Nghiệp Là Gì? Cấu tạo và Các Thành Phần Cốt Lõi
Ngày đăng: 24/01/2026
Trong kỷ nguyên Công nghiệp 4.0, Robot công nghiệp không còn là khái niệm xa lạ mà đã trở thành "xương sống" của các dây chuyền sản xuất hiện đại. Đối với các kỹ sư và nhân sự kỹ thuật, việc nắm vững định nghĩa chuẩn xác và cấu trúc hệ thống của robot là nền tảng quan trọng để vận hành và tối ưu hóa quy trình tự động hóa.
1.Robot công nghiệp là gì?
Robot công nghiệp (Industrial Robot) là một hệ thống máy móc tự động, có khả năng lập trình lại (reprogrammable), điều khiển đa mục đích và có thể cố định tại một vị trí hoặc di động để sử dụng trong các ứng dụng tự động hóa công nghiệp.
Về mặt kỹ thuật, đây là một hệ thống điều khiển phản hồi (servo-controlled) phức tạp. Cơ cấu cơ khí của nó bao gồm một chuỗi các khâu (links) cứng được liên kết với nhau bằng các khớp (joints), cho phép thực hiện các chuyển động chính xác trong không gian dưới sự giám sát của hệ thống máy tính.
Hình 1. Robot đang hoạt động trong công nghiệp
2.Các khối chức năng và thành phần chính của Robot công nghiệp
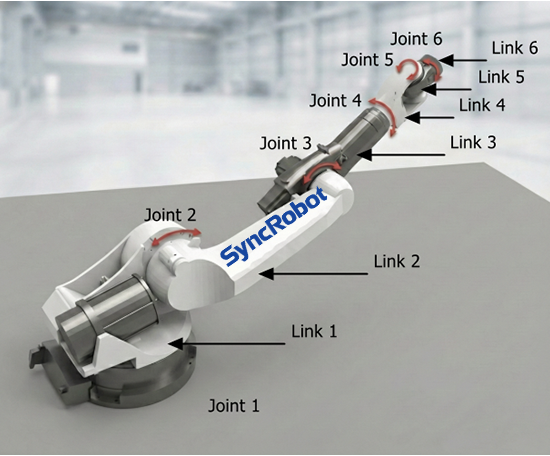
Để hiện thực hóa các chức năng vận hành phức tạp, một hệ thống robot công nghiệp hiện đại được cấu thành từ 6 thành phần vật lý phối hợp chặt chẽ với nhau

Hình 2. Các thành phần chính của Robot
2.1.Tay máy (Manipulator)
Tay máy được hiểu là cơ cấu cơ khí chính mô phỏng các chuyển động tương tự cánh tay con người trong không gian sản xuất. Tay máy trực tiếp thực thi các tác vụ vật lý, đồng thời giới hạn vùng không gian làm việc (workspace) mà robot có thể tiếp cận.
Đặc điểm kỹ thuật, tay máy được cấu thành từ hệ thống các khâu cứng nối với nhau bằng các khớp linh hoạt, qua đó xác định số bậc tự do (n-DOF) và khả năng tải (payload) của toàn hệ thống.
2.2.Bộ điều khiển (Controller - RCU)
Bộ điều khiển đóng vai trò là trung tâm xử lý dữ liệu, hay còn gọi là "bộ não" của toàn bộ hệ thống robot. Nhiệm vụ chính của RCU là lưu trữ chương trình lập trình, tính toán các thuật toán động học phức tạp và điều phối tín hiệu đến từng trục khớp để đảm bảo robot di chuyển chính xác theo quỹ đạo đã định.
Đặc điểm kỹ thuật nổi bật của khối này là sự kết hợp giữa phần cứng hiệu năng cao (CPU, bo mạch giao tiếp) và hệ điều hành thời gian thực (Real-time OS) nhằm tối ưu hóa tốc độ xử lý.
2.3.Hệ thống truyền động (Drive System)
Hệ thống truyền động chính là thành phần cung cấp năng lượng cho toàn bộ tay máy, được ví như "cơ bắp" của robot. Vai trò của hệ thống này là chuyển đổi năng lượng (điện, khí nén hoặc thủy lực) thành mô-men xoắn và vận tốc tại các khớp để tạo ra chuyển động thực tế.
Các robot hiện nay ưu tiên sử dụng động cơ Servo điện kết hợp với hộp số giảm tốc có độ chính xác cao để đạt được độ lặp lại sai số ở mức micromet.
2.4.Cơ cấu chấp hành cuối (End Effector)
Cơ cấu chấp hành cuối là thiết bị đầu cuối được gắn vào cổ tay robot, đóng vai trò là cầu nối tương tác trực tiếp giữa robot với đối tượng công. Thành phần này quyết định chức năng cụ thể của robot trong dây chuyền, từ việc cầm nắm vật liệu đến các nguyên công chuyên sâu như hàn, cắt laser hay phun sơn.
Điểm đặc của End Effector là tính đa dạng và khả năng thay đổi linh hoạt để phù hợp với từng quy trình sản xuất riêng biệt.
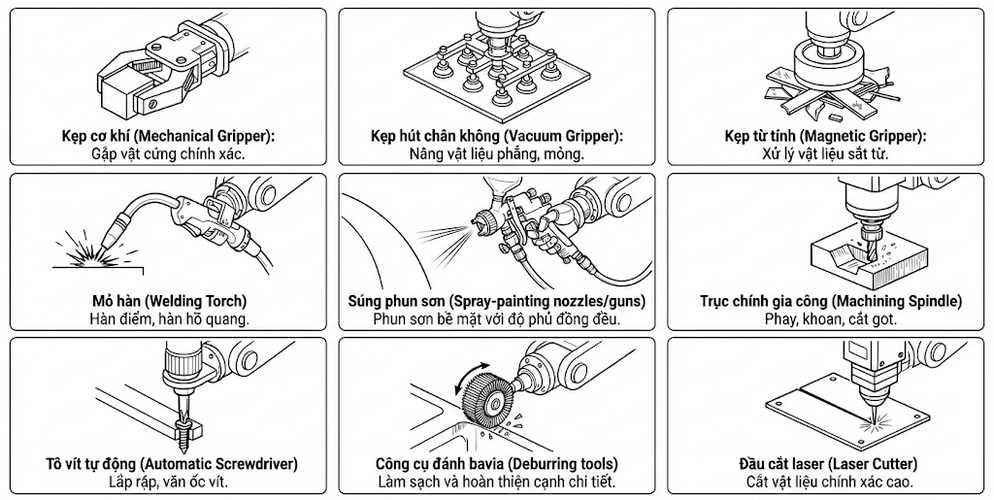
Hình 3. Các End Effector của Robot
2.5.Hệ thống cảm biến (Sensors)
Hệ thống cảm biến là thành phần giúp robot có khả năng phản hồi và làm việc thông minh hơn. Vai trò của cảm biến là cung cấp dữ liệu về trạng thái nội tại của cánh tay cũng như nhận diện biến động từ môi trường bên ngoài để đảm bảo độ chính xác và an toàn.
Đặc điểm kỹ thuật bao gồm các cảm biến nội tại (như Encoder đo vị trí) và các cảm biến ngoại tại (như hệ thống thị giác máy tính - Vision Systems hoặc cảm biến lực).
2.6.Bảng dạy (Teach Pendant)
Bảng dạy là giao diện tương tác trực tiếp giữa người vận hành và máy móc (HMI). Đây là công cụ dùng để "dạy" robot các điểm vị trí, nạp chương trình điều khiển và giám sát hoạt động ở chế độ thủ công. Về cấu tạo kỹ thuật, bảng dạy tích hợp màn hình hiển thị trực quan, phím điều hướng trục và bắt buộc phải trang bị nút dừng khẩn cấp (Emergency Stop) để can thiệp kịp thời trong các tình huống rủi ro.